Particle kinematics
The two basic geometric objects we are using are positions and vectors. Positions describe locations in space, while vectors describe length and direction (no position information). To describe the kinematics (motion) of bodies we need to relate positions and vectors to each other.
Position vectors
Two positions P and Q can be used to define a vector \( \vec{r}_{PQ} = \vec{PQ} \) from P to Q. We call this the relative position of Q from P. If we start from the origin O, so we have \( \vec{r}_{OP} = \vec{OP} \), then we call this the position vector of position P. When it is clear, we will write \( \vec{r}_P \) for this position vector, or sometimes even just \( \vec{r} \).
Points \(P\) and \(Q\) and their relative and absolute position vectors. Note that we can write the position vectors with respect to different origins and in different bases.
Heads up!
Similar to particle kinematics, rigid body kinematics also builds on this content later in the course.
Rigid body kinematics examines the velocity and acceleration of particles on the same rigid body.
Transformation of position vectors
The position vector \( \vec{r}_{OP} \) a point P depends on which origin we are using. Using a different origin will result in a different position vector for the same point. The position vectors of a point from two different origins differ by the offset vector between the origins:
Position vectors are defined by the origin and the point, but not by any choice of basis. We can write any position vector in any basis and it is still the same vector.
Basis for \( \vec{r}_{O_1P} \):
none \( \hat\imath,\hat\jmath \) \( \hat{u},\hat{v} \)Basis for \( \vec{r}_{O_1P} \):
none \( \hat\imath,\hat\jmath \) \( \hat{u},\hat{v} \)Velocity and acceleration vectors
The velocity \( \vec{v} \) and acceleration \( \vec{a} \) are the first and second derivatives of the position vector \( \vec{r} \). Technically, this is the velocity and acceleration relative to the given origin, as discussed in detail in the sections on relative motion and frames.
The velocity can be decomposed into components parallel and perpendicular to the position vector, reflecting changes in the length and direction of \( \vec{r} \).
| Show: | ||||
| Movement: | circle | var-circle | ellipse | arc |
| trefoil | eight | comet | pendulum | |
| Show: | ||||
Velocity and acceleration of various movements. Compare to the vector derivatives for moving vectors figure.
Application alert!
Track transition curves uses velocity and acceleration vectors.

Velocity and acceleration vectors can be used to analyze optimal road curves for driving.
Application alert!
Projectiles with air resistance uses velocity and acceleration vectors.

Velocity and acceleration vectors can be used to analyze objects following projectile motion with air resistance.
Velocity and acceleration in Cartesian basis
Differentiating in a fixed Cartesian basis can be done by differentiating each component.
Velocity and acceleration in polar basis
Computing velocity and acceleration in a polar basis must take account of the fact that the basis vectors are not constant.
The acceleration term \( -r \dot{\theta}^2 \hat{e}_r \) is called the centripetal (center-seeking) acceleration, while the \( 2\dot{r} \dot{\theta} \hat{e}_{\theta} \) term is called the Coriolis acceleration.
| Movement: | circle | var-circle | ellipse | arc |
| trefoil | eight | comet | pendulum | |
| Show: | ||||
| Origin: | \(O_1\) | \(O_2\) | ||
Velocity and acceleration in the polar basis. Compare to the velocity and acceleration of various movements figure. Observe that \( \hat{e}_r,\hat{e}_\theta \) are not related to the path (not tangent, not in the direction of movement), but rather are defined only by the position vector. Note also that the polar basis depends on the choice of origin.
Summary table
| Cartesian | Polar | |
|---|---|---|
| Position | ||
| Velocity | ||
| Acceleration |
Heads up!
Position velocity acceleration builds on this content in Mechanism design.
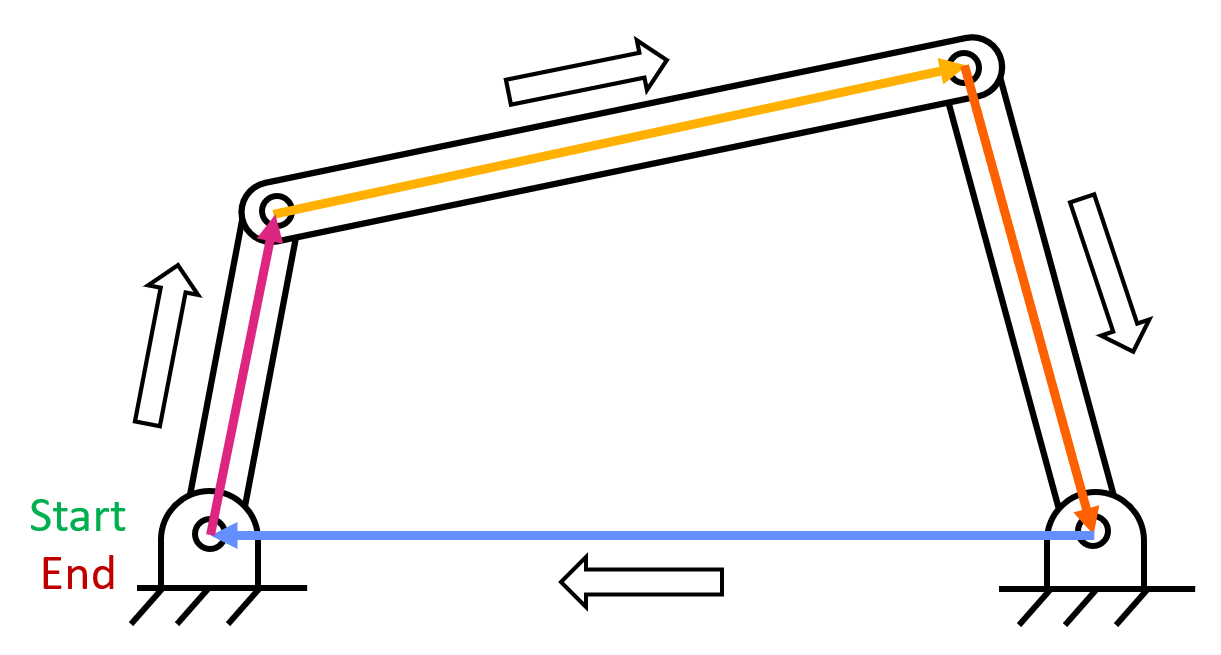
Position, Velocity, Acceleration (PVA) analysis is used to analytically determine the motion of a mechanism. Position determines the configuration of the mechanism, velocity determines the kinetic energy and momentum, and acceleration determines the forces. The known geometry, initial configurations, and PVA data of one link determines the PVA data for the other links.
Angular velocity
A rotation of a vector is a change which only alters the direction, not the length, of a vector. A rotation consists of a rotation axis and a rotation rate. By taking the rotation axis as a direction and the rotation rate as a length, we can write the rotation as a vector, known as the angular velocity vector \( \vec{\omega} \). We use the right-hand rule to describe the direction of rotation. The units of \( \vec{\omega} \) are \(\rm rad/s\) or \( {}^\circ/s \).
Rotation axis: \( \hat\imath \) \( \hat\jmath \) \( \hat{k} \) \( \hat\imath + \hat\jmath \) \( \hat\imath + \hat\jmath + \hat{k} \)
Angular velocity vector \(\vec\omega\). The direction of \(\vec\omega\) is the axis of rotation, while the magnitude is the speed of rotation (positive direction given by the right-hand rule).
If an object is rotating with angular velocity \( \omega \) about a fixed origin, then the velocity and acceleration are given by the following relations:
Did you know?
The Greek letter ω (lowercase omega) is the last letter of the Greek alphabet, leading to expressions such as “from alpha to omega” meaning “from start to end”. Omega literally means O-mega, meaning O-large, as capital Omega (written Ω) developed from capital Omicron (written Ο) by breaking the circle and turning up the edges. Omicron is literally O-micron, meaning O-small, and it is the ancestor of the Latin letter O that we use today in English.
| Α | α | alpha | Ι | ι | iota | Ρ | ρ | rho |
| Β | β | beta | Κ | κ | kappa | Σ | σ | sigma |
| Γ | γ | gamma | Λ | λ | lambda | Τ | τ | tau |
| Δ | δ | delta | Μ | μ | mu | Υ | υ | upsilon |
| Ε | ε | epsilon | Ν | ν | nu | Φ | φ | phi |
| Ζ | ζ | zeta | Ξ | ξ | xi | Χ | χ | chi |
| Η | η | eta | Ο | ο | omicron | Ψ | ψ | psi |
| Θ | θ | theta | Π | π | pi | Ω | ω | omega |
The Greek alphabet, shown above, was the first true alphabet, meaning that it has letters representing phonemes (basic significant sounds) and includes vowels as well as consonants. The Greek alphabet was was derived from the earlier Phoenician alphabet, which was probably the original parent of all alphabets. This shows that the idea of an alphabet is so non-obvious that it has only ever been invented once, and then always copied after that.
Application alert!
Celestial velocities uses angular velocity.
Angular velocity is an important variable to consider when analyzing celestial objects revolving around one another.
Vector derivatives and rotations
If a unit vector \( \hat{a} \) is rotating, then the angular velocity vector \( \vec{\omega} \) is defined so that:
Rotations in 2D
In 2D the angular velocity can be thought of as a scalar (positive for counter-clockwise, negative for clockwise). This scalar is just the out-of-plane component of the full angular velocity vector. We can draw the angular velocity as either a vector pointing out of the plane, or as a circle-arrow in the plane, which is simpler for 2D diagrams.
Show:
Comparison of the vector and scalar representations of \(\vec\omega\) for 2D rotations.
In 2D the angular velocity scalar \(\omega\) is simply the derivative of the rotation angle \(\theta\) in the plane:
The right-hand rule convention for angular velocities means that counter-clockwise rotations are positive, just like the usual angle direction convention.
Did you know?
Angular directions have long been considered to have magical or spiritual significance. In Britain the counterclockwise direction was once known as widdershins, and it was considered unlucky to travel around a church in a widdershins direction.
Interestingly, right-handed people tend to naturally draw circles in a counterclockwise direction, and clockwise drawing in right-handed children is an early warning sign for the later development of schizophrenia [Blau, 1977].
References
- T. H. Blau. Torque and schizophrenic vulnerability. American Psychologist, 32(12):997–1005, 1977. DOI: 10.1037/0003-066X.32.12.997.
Rotations and vector “positions”
The fact that vectors don't have positions means that vector rotations are independent of where vectors are drawn, just like for derivatives.
Show:
Rotational motion of vectors which are drawn moving about. Note that the drawn position does not affect the angular velocity $\omega$ or the derivative vectors.
Properties of rotations
Rotations are rigid transformations, meaning that they keep constant all vector lengths and all relative vector angles. These facts are reflected in the following results, which all consider two vectors \( \vec{a} \) and \( \vec{b} \) that are rotating with angular velocity \( \vec\omega \).
Rodrigues’ rotation formula
Rodrigues’ rotation formula gives an explicit formula for a vector rotated by an angle about a given axis.
Angular acceleration
In polar coordinates, acceleration consists of both radial and tangential components. The tangential component is directly related to changes in the angular velocity, which introduces the concept of angular acceleration.
Angular acceleration, denoted as \( \ddot{\theta} \) represents the rate of change of angular velocity \( \dot{\theta} \) with respect to time. It appears as part of the total acceleration in the tangential direction, described by the unit vector \( \hat{e}_{\theta} \). The full expression for the acceleration in polar coordinates is:
Here, the first term of the equation represents the radial component, described by the unit \( \hat{e}_r \), and the second term is the angular component, described by the vector unit \( \hat{e}_{\theta} \). In the radial component, there is a radial (\( \ddot{r} \)) and a centripetal (\( r\dot{\theta}^2 \)) term. In the angular component, there is an angular (\( r\ddot{\theta} \)) and a coriolis (\( 2\dot{r}\dot{\theta} \)) term.
System comparison: Cartesian/polar/tangent-normal
| Cartesian | Polar | Tangent-Normal | |
|---|---|---|---|
| Position | |||
| Velocity | |||
| Acceleration |