Rigid body kinematics
Rigid bodies
A rigid body is an extended area of material that includes all the points inside it, and which moves so that the distances and angles between all its points remain constant. The location of a rigid body can be described by the position of one point \(P\) inside it, together with the rotation angle of the body (one angle in 2D, three angles in 3D).| location description | velocity description | |
|---|---|---|
| point mass | position vector \( \vec{r}_P \) | velocity vector \( \vec{v}_P \) |
| rigid body in 2D |
position vector \( \vec{r}_P \) angle \(\theta\) |
velocity vector \( \vec{v}_P \) angular velocity \( \omega \) |
| rigid body in 3D |
position vector \( \vec{r}_P \) angles \( \theta,\phi,\psi \) |
velocity vector \( \vec{v}_P \) angular velocity vector \( \vec{\omega} \) |
Neither point masses nor rigid bodies can physically exist, as no body can really be a single point with no extent, and no extended body can be exactly rigid. Despite this, these are very useful models for mechanics and dynamics.
Rotating rigid bodies
All points on a rigid body have the same angular rotation angles, as we can see on the figure below. Because the angular velocity is the derivative of the rotation angles, this means that every point on a rigid body has the same angular velocity \( \vec{\omega} \), and also the same angular acceleration \( \vec{\alpha} \).
In 2D the angle \( \theta \) of a rigid body the angle of rotation from a fixed reference (typically the \( \hat\imath \) direction), measured positive counter-clockwise. The angular velocity is \( \omega = \dot\theta \) and the angular acceleration is \( \alpha = \dot\omega = \ddot\theta \). The vector versions of these are \( \vec\omega = \omega \, \hat{k} \) and \( \vec\alpha = \alpha\,\hat{k} \), where \( \hat{k} \) is the out-of-plane direction.
Show:
All points on a rigid body rotate at the same rate. Body \( \mathcal{B}_1 \) is rotated by angle \(\theta_1\), so its angular velocity is \( \omega_1 = \dot{\theta}_1 \), and similarly for the second body.
Did you know?
Rotations in 3D are significantly more complicated than rotations in 2D. Unlike positions, velocities, etc, which simply go from 2D vectors to 3D vectors, rotational quantities go from scalars in 2D to full 3D vectors in 3D. Angular velocity and angular acceleration are somewhat straightforward, so equations #rkg-er hold in both 2D and 3D, but understanding the rotations themselves is significantly more complicated. There are three main ways that 3D rotations can be represented:
Detailed study of rotations in 3D is necessary for a full understanding of topics ranging from satellite attitude control to articulated robot construction, and is usually covered in advanced dynamics courses.
Points on rigid bodies
If we know how one point \(P\) on a rigid body is moving and we also know how the body is rotating, then we can calculate the movement of any other point \(Q\) on the same body. The formulas for this are given below.
The term \( \vec{\omega} \times (\vec{\omega} \times \vec{r}_{PQ}) \) in the acceleration equation above is called the centripetal (center-seeking) term, as it is always in the direction \( -\vec{r}_{PQ} \) and so acts from \(Q\) towards the “center” \(P\).
Show: none position velocity acceleration
Two points \(P\) and \(Q\) on a moving and accelerating rigid body.
Rigid bodies in 2D
The #rkg-er equations above are valid in both 2D and 3D. If we know that we are in the 2D \( \hat\imath,\hat\jmath \) plane then the angular velocity vector is orthogonal to the plane in the \( \hat{k} \) direction and the equations can be written in a simpler form with the perpendicular vector notation #rvv-en, as shown below.
If a point \(M\) on a rigid body has zero velocity then it is called the instantaneous center of rotation, because the velocity of all points on the body will be given by simple rotation about \(M\) with the angular velocity \( \vec{\omega} \) of the body. In 2D we can always find the instantaneous center with the following equation, although it might be outside of the physical body.
In 3D there will only be an instantaneous center if \( \vec{v}_P \) is orthogonal to \( \vec{\omega} \), in which case there will many choices for the instantaneous center, all lying on a line in the \( \vec{\omega} \) direction.
If \(M\) is an instantaneous center, so it has zero velocity, then the velocity of any other point on the rigid body is given by the following equation.
| Movement: | translation | var. translation | rotation | var. rotation | slide |
| hinge | circle | spin | reverse spin | oscillation |
Point \(P\)
Body
\(Q\) Velocity
none
\( \vec{v}_P \) (trans.)
\( \vec{\omega} \times \vec{r}_{PQ} \) (rot.)
\( \vec{v}_Q \) (total)
\(Q\) Acceleration
none
\( \vec{a}_P \) (trans.)
\( \vec{\alpha} \times \vec{r}_{PQ} \) (ang.)
\( \vec{\omega} \times (\vec{\omega} \times \vec{r}_{PQ}) \) (cent.)
\( \vec{a}_Q \) (total)
Velocity and acceleration of points on a rigid body undergoing different motions.
Constrained motion
One of the most common type of motion is constrained motion, where an object is restricted to move in a certain way.
Generally, a point constrained to move in a specific direction obeys the following equation:
The above equation is difficult to apply to a system with a collection of points or particles. It is not the only way to derive constraint equations. For example, rigid body kinematics equations (also known as relative motion equations) are derived using the definition of a rigid body. Namely, the distance and angles between all points remain constant. See rigid body relations. It is often best to look at examples of constrained motion to see how constraint equations are differentiated to obtain velocity and acceleration.
We can visualize the motion of several constrained systems, shown on the figure below.
| System: | rod-circular | slider-crank |
rod-circular
slider-crank
In general, the steps involved in analyzing systems with constrained motions are as follows:
Reference material
- Calculus and vectors
- Rigid bodies
- Kinetics of point masses
- Kinetics of rigid bodies
- Free body diagrams
- Energy and work
Applications
- Four-bar linkages
Constraint forces
If an object is constrained to move in a specific direction, by Newton's second law, there must be forces or moments preventing the movement of the object in that direction. Those are called constraint forces.
The approach to solving for constraint forces is the same approach to solve for any forces/moments that are not constraint forces. Namely, drawing a free body diagram, and applying Newton's equations. See the solution procedure with Newton's equations.
Let's return to our example of the rod leaning against a wall.
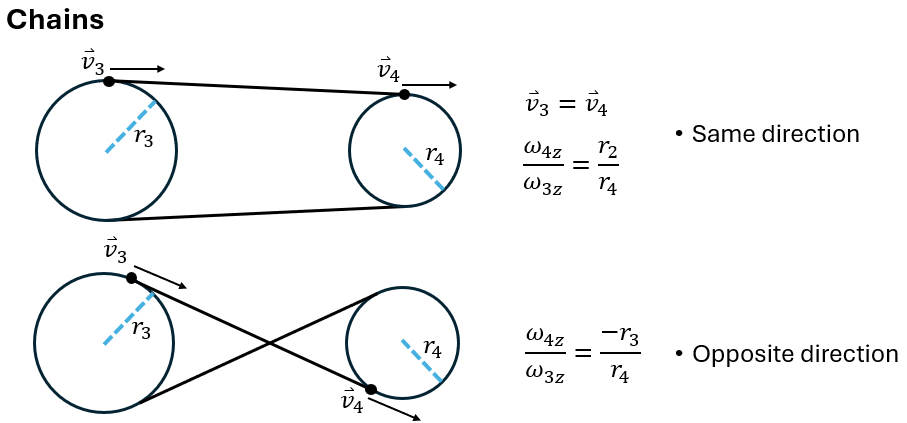
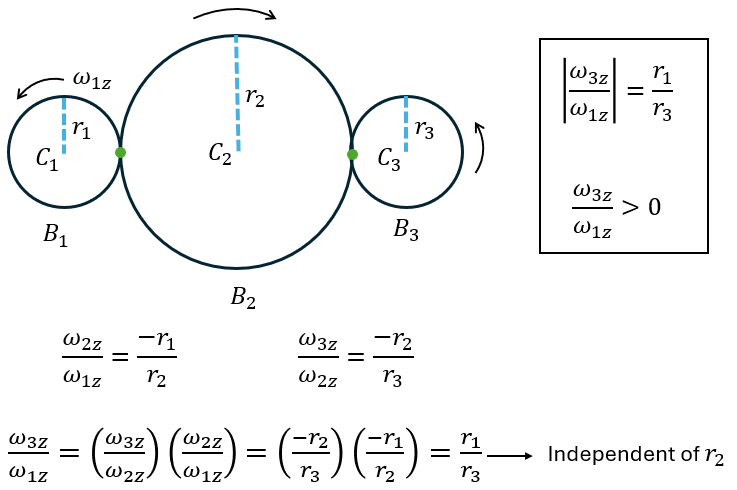
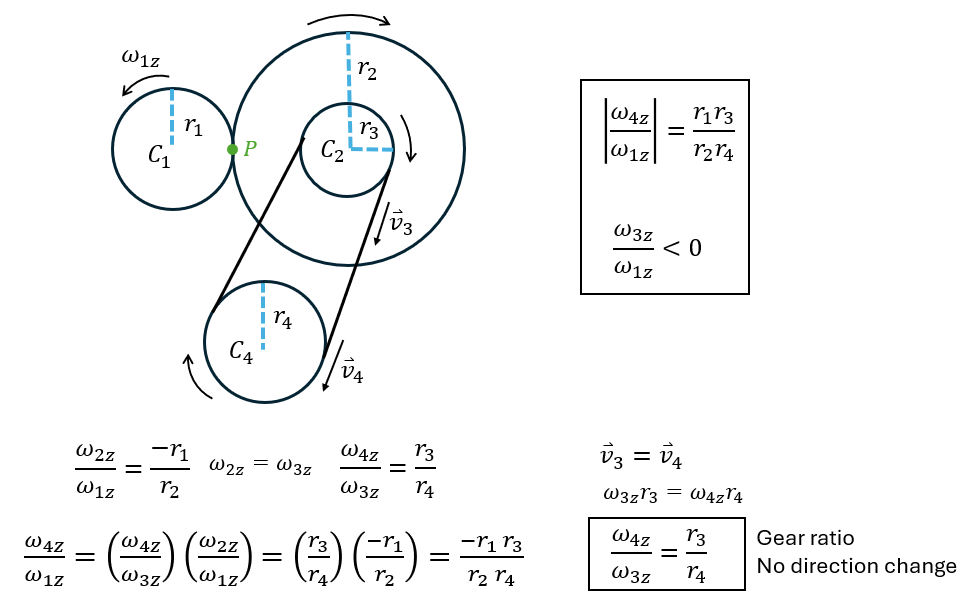
Gears
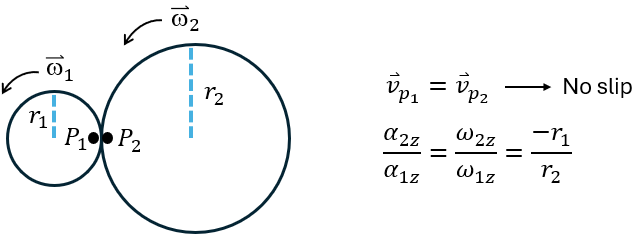
- Larger gear - > slower spin
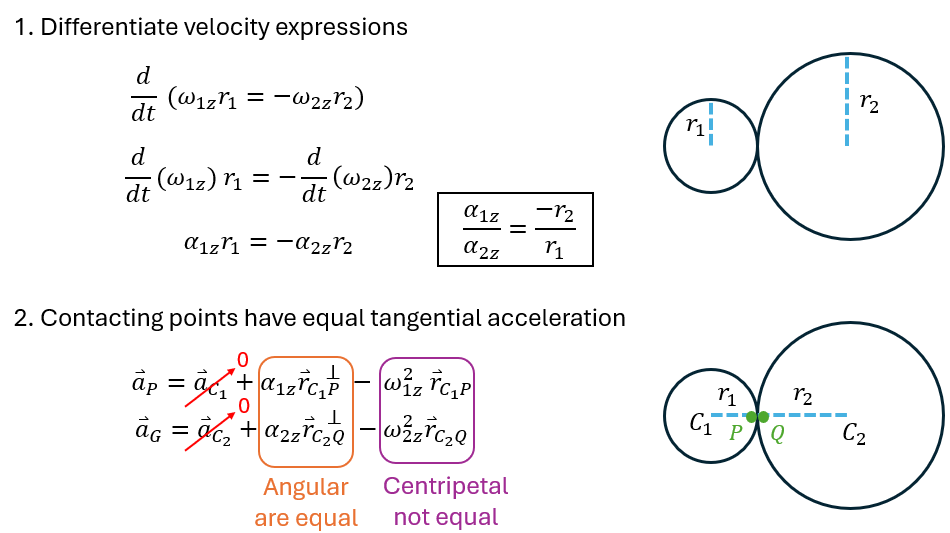
- Accelerations - > tangential are equal but centripetal are not
- Opposite direction
Standard sign convention
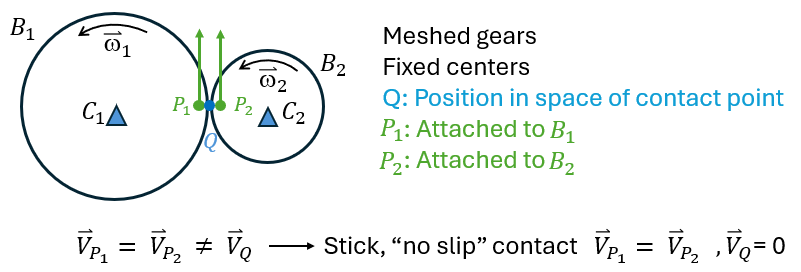
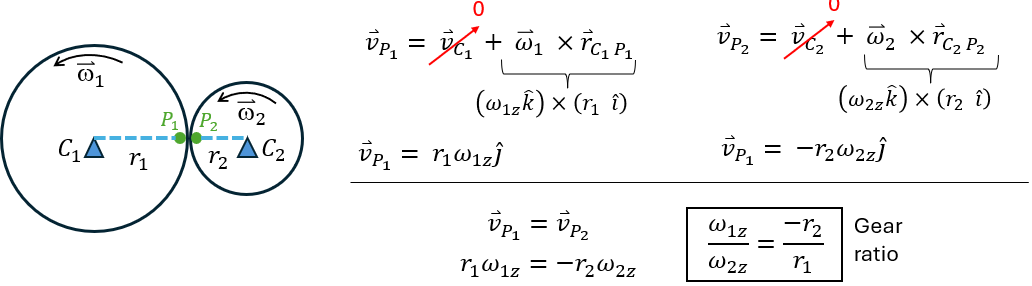
- \( \omega_{1z} \) and \( \omega_{2z} \) have opposite signs (the gears rotate in opposite direction)
- Smaller gears rotate faster
Steering geometry
We are all familiar with the idea that turning the steering wheel in a car rotates the front wheels, causing the car to steer into a turn. But why do we normally steer with the front wheels rather than the rear wheels (or all four wheels, as shown below)? Do both front wheels turn the same amount, or is something more complicated going on?

A Mercedes-Benz Typ G 5 (W 152, 1937–1941) housed in Technik Museum Speyer, showing the use of a four-wheel steering system. Image source: Wikimedia Commons (CC BY-SA 3.0) (full-sized image).
{kind=link}
{kind=link}
Reference material
Turning rigid bodies
When a rigid body turns in a circle, the four corners of the body all move with different velocities and speeds. If we think of a car as a single rigid body with wheels at the corners, this means the four wheels move with different speeds and also different directions. Car designers can choose different steering arrangements, as shown below, where the steering can be with the front two wheels only (conventional cars), with the rear two wheels only (forklifts), or with all four wheels in some high-performance cars.
| Show: | ||
Turn radius:
Vehicle offset:
A car turning in a circle, showing the directions that the wheels must point as the turn radius \(r\) and offset \(d\) change.
Did you know?
Forklifts typically have fixed front wheels and steer with the rear wheels. This gives them great control over the position of the front lifting forks, but makes steering harder for the operator. Rear-wheel steering is a type of non-minimum phase control system. The technical definition of minimum phase is somewhat complicated, but for vehicle steering it essentially means that we have to steer the “wrong way”. For example, to turn right in a forklift we have to first swing the back out to the left. This makes it very easy to accidentally run into obstacles, and is also unstable at higher speeds.

A Yale GLP-50VX forklift executing a sharp right-hand turn. Image credit: Flickr image by Anastasia Victor (CC BY 2.0) (full-sized image).
{kind=link}
Sometimes in cars it would be convenient to also steer with the rear or trailing wheels, for example when trying to park in a tight spot. We actually have a mechanism for converting a car to trailing-wheel steering, which is to drive backwards, such as when parallel parking.
Ackerman steering geometry
In a conventional car, the rear two wheels are fixed to point straight ahead, while the front two wheels must turn at different but matched angles. To achieve the correct front wheel angles, cars typically use a four-bar linkage as shown below. The pins at \(A\) and \(B\) are called kingpins (normally actually ball joints in modern cars), the \(CD\) rod is called the tie rod, and the \(AD\) and \(BC\) rods are called steering arms. By correctly choosing the lengths of the linkage rods, the car steering will automatically produce nearly correctly matched front wheel angles to make a perfect turn with any radius of curvature.
Steering pivot offset angle:
Adjustable Ackerman steering geometry. The graph shows the radius of curvature for the two front wheels as a function of the rack offset \(d\).
Did you know?
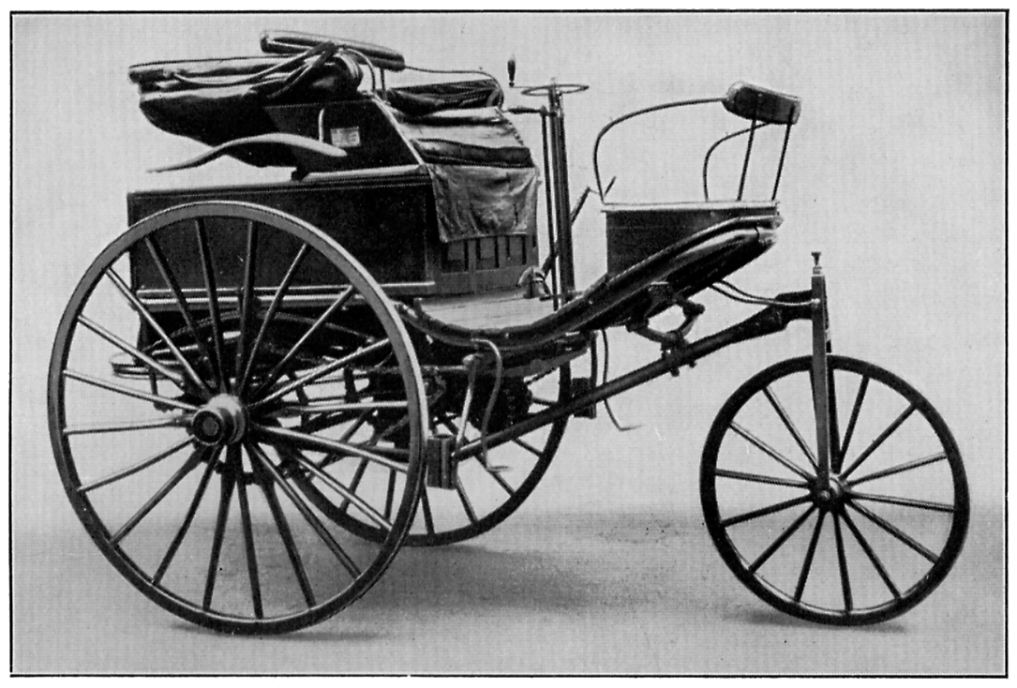
Three wheeled vehicles with two wheels in back and one in front (a delta or tricycle configuration) avoid the need for complicated steering geometry, leading Karl Benz to use this system in the world's first automobile.

Benz Patent-Motorwagen Nr. 3 from 1888. Image credit: Wikimedia Commons (public domain) (full-sized image).
{kind=link}
{kind=link}
Episode 4 of Season 9 of Top Gear featured a segment on the Reliant Robin, a three-wheel car produced in the 1970s in the United Kingdom. This Top Gear episode clearly demonstrates some of the reasons that single-wheel steering systems for cars have not achieved long-lasting commercial success.
Three-wheeled cars were rather popular with British manufacturers in the 1960s and 1970s. As well as single-wheel-in-front models like the Reliant Robin, there were also production cars with a single wheel in the back (a tadpole configuration). An example of this is the smallest production car ever made, the Peel 50, shown in another Top Gear episode (Series 10, Episode 3).
Knee joint
The human knee joint is a type of biological hinge, which allows movement in only one primary angle. The knee connects the femur (the upper leg bone) to the tibia (the larger of the two lower leg bones). These two bones sit next to each other and are free to rotate about a single axis. A mechanism is needed to keep the two legs bones attached to each other, while still allowing rotation. In the case of the human knee this is achieved with a four-bar linkage consisting of the two bones together with the anterior cruciate ligament (ACL) and posterior cruciate ligament (PCL), as shown below.
An MRI image of a sagittal section through a human knee joint, showing the ACL and PCL ligaments. Image credit: Wikimedia Commons image (CC BY-SA 2.0).
{kind=link}
The four-bar model of the knee is only approximate, and neglects many important mechanical features. In particular, the ACL and PCL are not rigid rods, and can only provide tensile forces (they act as mechanical ropes). The compressive force is actually provided by the meniscus that separates the femur and tibia bones. In the simple four-bar knee model shown here, the rigid rods include the effects of both the ligaments and the meniscus.
References
- A. B. Zavatsky and J. J. O'Connor. A model of human knee ligaments in the sagittal plane: Part 1: Response to passive flexion. Proceedings of the Institution of Mechanical Engineers, Part H: Journal of Engineering in Medicine, 206(3):125–134, 1992. DOI: 10.1243/PIME_PROC_1992_206_280_02
Did you know?
No joints in the human body have the rotating bone fully constrained by the enclosing socket bone. Instead, like the knee, they have a partial socket or cylinder and the rotating bone is held in place by ligaments. This type of arrangement is typical for most animals, with one rare exception being the European Badger (Meles Meles). In older badgers, the jaw rotates on an entirely enclosed pivot, as shown below. This means that the badger cannot waggle its jaw side-to-side as humans can, and also means that the badger jaw cannot be dislocated or disconnected without breaking the bone.
Image credit: Wikimedia Commons (CC BY-SA 3.0) (full-sized image).
{kind=link}
{kind=link}
Suspensions with Watt's linkage
Apart from being one of the inventors of the steam engine and having an SI unit named after him, James Watt also developed a linkage to produce approximate straight line motion. Watt's linkage consists of two long near-parallel links and a small floating link between them, with the near-linear motion occurring for a coupler point midway along the floating link. This linkage is commonly used in suspension systems, as shown below.
The rear suspension of a 1998 Ford Ranger EV. Image credit: Wikimedia Commons (CC SA 1.0) (full-sized image).
{kind=link}
{kind=link}